一、论文介绍
读论文系列:
一句话概括:SSD就是关于类别的多尺度RPN网络
基本思路:
- 基础网络后接多层feature map
- 多层feature map分别对应不同尺度的固定anchor
- 回归所有anchor对应的class和bounding box
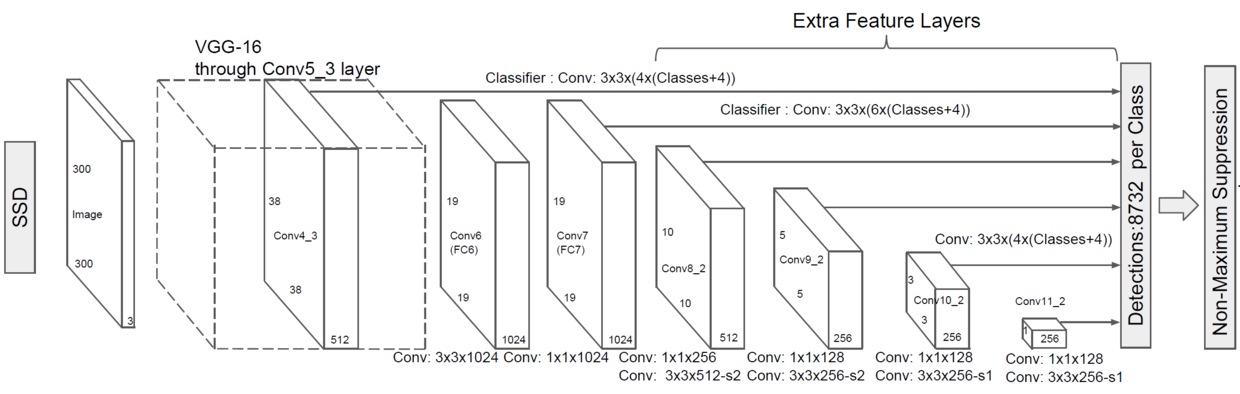
网络结构简介
-
输入:300x300
-
经过VGG-16(只到conv4_3这一层)
-
经过几层卷积,得到多层尺寸逐渐减小的feature map
-
每层feature map分别做3x3卷积,每个feature map cell(又称slide window)对应k个类别和4个bounding box offset,同时对应原图中6(或4)个anchor(又称default box)
- 38x38, 最后3x3, 1x1三个feature map的每个feature map cell只对应4个anchor,分别为宽高比: 1:1两种,1:2, 2:1两种,因此总共有 38 x 38 x 4 + 19 x 19 x 6 + 10 x 10 x 6 + 5 x 5 x 6 + 3 x 3 x 4 + 1 x 1 x 4 = 8732 个anchor
- 其他feature map的feature map cell对应6个anchor,分别为宽高比: 1:1两种,1:2, 2:1两种,1:3, 3:1两种
- 每层的feature map cell对应的anchor计算方法如下
- 位置:假设当前feature map cell是位于第i行,第j列,则anchor的中心为(i+0.5,j+0.5),注意,这个值需要处理放缩到0-1之间作为相对位置
- 缩放因子:
其中s_min为0.2,s_max为0.9,m为添加的feature map的层数,缩放因子就是为不同feature map选择不同的大小的anchor,要求小的feature map对应的anchor尽量大,因为越小的feature map,其feature map cell的感受野就越大
-
anchor宽高:
其中,a_r∈{1,2,3,1/2,1/3},可以理解为在缩放因子选择好anchor尺寸后,用a_r来控制anchor形状,从而得到多尺度的各种anchor,当a_r=1时,增加一种s_k=sqrt(s_{k-1}*s_{k+1}),于是每个feature map cell通常对应6种anchor。
-
网络的训练目标就是,回归各个anchor对应的类别和位置
实际送入分类/回归器的样本选择问题
-
正样本 选择与bounding box jaccard overlap(两张图的交集/并集)大于0.5的anchor作为正样本
-
样本比例 Hard negative mining:由于负样本很多,需要去掉一部分负样本,先整图经过网络,根据每个anchor的最高类置信度进行排序,选择置信度靠前的样本,这样筛选出来的负样本也会更难识别,并且最终正负样本比例大概是1:3
Loss
还是一如既往的location loss + classification loss,并为location loss添加了系数α(然而实际上α=1)进行平衡,并在batch维度进行平均
- x是x_{ij}^{p}的集合x_{ij}^{p}={1,0},用于判断第i个anchor是否是第j个bounding box上的p类样本
- c是c_{i}^{p}的集合,c_{i}^{p}是第i个anchor预测为第p类的概率
- l是预测的bounding box集合
- g是ground true bounding box集合
其中定位loss与faster rcnn相同
这个式子里的k不是很明确,其实想表达不算背景0类的意思,且前景类只为match的类算location loss
分类loss就是很常用的softmax交叉熵了
相关内容各篇代码介绍部分还会涉及,可加深理解:
二、开源代码文档
原项目地址:
Fork版本项目地址:
根据README的介绍,该项目收到了tf-slim项目中包含了多种经典网络结构(分类用)的启发,使用了模块化的编程思想,可以替换检查网络的结构,其模块组织如下:
- datasets: 数据及接口,interface to popular datasets (Pascal VOC, COCO, ...) and scripts to convert the former to TF-Records;
- networks: 网络结构定义,definition of SSD networks, and common encoding and decoding methods (we refer to the paper on this precise topic);
- pre-processing: 预处理和数据增强,pre-processing and data augmentation routines, inspired by original VGG and Inception implementations.
项目给提供了两个已训练的VGG网络,输入分别为300和512。
除此之外,还有一个迷你的SSD展示ipynb脚本,可以快读演示预测。
脚本tf_convert_data.py
将数据转换为一组TF-Record文件,调用示意如下:
DATASET_DIR=./VOC2007/test/OUTPUT_DIR=./tfrecordspython tf_convert_data.py \ --dataset_name=pascalvoc \ --dataset_dir=${DATASET_DIR} \ --output_name=voc_2007_train \ --output_dir=${OUTPUT_DIR} 脚本caffe_to_tensorflow.py
可以把caffe的模型转换为checkpoints,供程序使用:
CAFFE_MODEL=./ckpts/SSD_300x300_ft_VOC0712/VGG_VOC0712_SSD_300x300_ft_iter_120000.caffemodelpython caffe_to_tensorflow.py \ --model_name=ssd_300_vgg \ --num_classes=21 \ --caffemodel_path=${CAFFE_MODEL} 脚本train_ssd_network.py
用于训练模型,
- 可以自定义训练的明细(dataset, optimiser, hyper-parameters, model, ...)
- 可以载入ckeckpoints后fine-tune
使用VGG-300模型进行微调的示意如下,
DATASET_DIR=./tfrecordsTRAIN_DIR=./logs/CHECKPOINT_PATH=./checkpoints/ssd_300_vgg.ckptpython train_ssd_network.py \ --train_dir=${TRAIN_DIR} \ --dataset_dir=${DATASET_DIR} \ --dataset_name=pascalvoc_2012 \ --dataset_split_name=train \ --model_name=ssd_300_vgg \ --checkpoint_path=${CHECKPOINT_PATH} \ --save_summaries_secs=60 \ --save_interval_secs=600 \ --weight_decay=0.0005 \ --optimizer=adam \ --learning_rate=0.001 \ --batch_size=32 脚本eval_ssd_network.py
使用checkpoint文件来检验训练效果,调用示意如下:
EVAL_DIR=./logs/CHECKPOINT_PATH=./checkpoints/VGG_VOC0712_SSD_300x300_ft_iter_120000.ckptpython eval_ssd_network.py \ --eval_dir=${EVAL_DIR} \ --dataset_dir=${DATASET_DIR} \ --dataset_name=pascalvoc_2007 \ --dataset_split_name=test \ --model_name=ssd_300_vgg \ --checkpoint_path=${CHECKPOINT_PATH} \ --batch_size=1 这个脚本可以在训练脚本运行的同时运行,动态的监测当前训练效果,此时命令如下:
EVAL_DIR=${TRAIN_DIR}/evalpython eval_ssd_network.py \ --eval_dir=${EVAL_DIR} \ --dataset_dir=${DATASET_DIR} \ --dataset_name=pascalvoc_2007 \ --dataset_split_name=test \ --model_name=ssd_300_vgg \ --checkpoint_path=${TRAIN_DIR} \ --wait_for_checkpoints=True \ --batch_size=1 \ --max_num_batches=500 而且文档描述的很不简单,eval脚本可以监测到GPU空闲,
one can pass to training and validation scripts a GPU memory upper limit such that both can run in parallel on the same device. If some GPU memory is available for the evaluation script, the former can be run in parallel as follows:
脚本ssd_vgg_preprocessing.py、ssd_vgg_300/512.py
、ssd_vgg_300/512.pyone may also want to experiment with data augmentation parameters (random cropping, resolution, ...) in ssd_vgg_preprocessing.py or/and network parameters (feature layers, anchors boxes, ...) in ssd_vgg_300/512.py
预训练分类网络扩展为SSD
可以尝试构建一个基于标准体系结构的新的SSD模型(VGG, ResNet, Inception,…),并在其之上设置multibox层(使用特定的锚点,比率,…)。为此,还可以只加载原始架构的权重,并随机初始化网络的其余部分,从而对网络进行微调。例如,在vgg16架构的情况下,可以将一个新模型训练如下:
DATASET_DIR=./tfrecordsTRAIN_DIR=./log/CHECKPOINT_PATH=./checkpoints/vgg_16.ckptpython train_ssd_network.py \ --train_dir=${TRAIN_DIR} \ --dataset_dir=${DATASET_DIR} \ --dataset_name=pascalvoc_2007 \ --dataset_split_name=train \ --model_name=ssd_300_vgg \ --checkpoint_path=${CHECKPOINT_PATH} \ --checkpoint_model_scope=vgg_16 \ --checkpoint_exclude_scopes=ssd_300_vgg/conv6,ssd_300_vgg/conv7,ssd_300_vgg/block8,ssd_300_vgg/block9,ssd_300_vgg/block10,ssd_300_vgg/block11,ssd_300_vgg/block4_box,ssd_300_vgg/block7_box,ssd_300_vgg/block8_box,ssd_300_vgg/block9_box,ssd_300_vgg/block10_box,ssd_300_vgg/block11_box \ --trainable_scopes=ssd_300_vgg/conv6,ssd_300_vgg/conv7,ssd_300_vgg/block8,ssd_300_vgg/block9,ssd_300_vgg/block10,ssd_300_vgg/block11,ssd_300_vgg/block4_box,ssd_300_vgg/block7_box,ssd_300_vgg/block8_box,ssd_300_vgg/block9_box,ssd_300_vgg/block10_box,ssd_300_vgg/block11_box \ --save_summaries_secs=60 \ --save_interval_secs=600 \ --weight_decay=0.0005 \ --optimizer=adam \ --learning_rate=0.001 \ --learning_rate_decay_factor=0.94 \ --batch_size=32 在前一个命令中,训练脚本随机初始化checkpoint_exclusive de_scope的权重,并从检查点文件vgg_16加载。ckpt网络的剩余部分。注意,我们还指定了trainable_scope参数,以便此时只训练新的SSD组件,并保持VGG网络的其余部分不变。一旦网络收敛到良好的第一个结果(例如~0.5 mAP),就可以对整个网络进行如下微调:
DATASET_DIR=./tfrecordsTRAIN_DIR=./log_finetune/CHECKPOINT_PATH=./log/model.ckpt-Npython train_ssd_network.py \ --train_dir=${TRAIN_DIR} \ --dataset_dir=${DATASET_DIR} \ --dataset_name=pascalvoc_2007 \ --dataset_split_name=train \ --model_name=ssd_300_vgg \ --checkpoint_path=${CHECKPOINT_PATH} \ --checkpoint_model_scope=vgg_16 \ --save_summaries_secs=60 \ --save_interval_secs=600 \ --weight_decay=0.0005 \ --optimizer=adam \ --learning_rate=0.00001 \ --learning_rate_decay_factor=0.94 \ --batch_size=32 在TF-Slim模型页面上可以找到许多流行的深度架构的预先训练权重。